






„Lego-Mindstorms“ (WP Klasse 7)
Jeden Dienstag trifft sich der Wahlpflichtkurs „Robotik Klasse 7“ im Computerraum der Holderbergschule. Die Teilnehmergruppe setzt sich aus 16 Schülerinnen und Schülern der Jahrgangsstufe 7 sowohl aus dem Hauptschul-, als auch aus dem Realschulbereich zusammen.
In dieser Stunde steht eine neue Aufgabenstellung auf dem Plan: „Die Schüler sollen ein Fahrzeug bauen und programmieren, das sich frei im Raum bewegt und möglichst nicht mit Wänden, Tisch- oder Stuhlbeinen kollidiert“. Die Idee zu dieser Aufgabe entwickelte sich aus einer Schülerfrage in der letzten Stunde: „Wie funktioniert eigentlich ein Staubsauger-Roboter?“
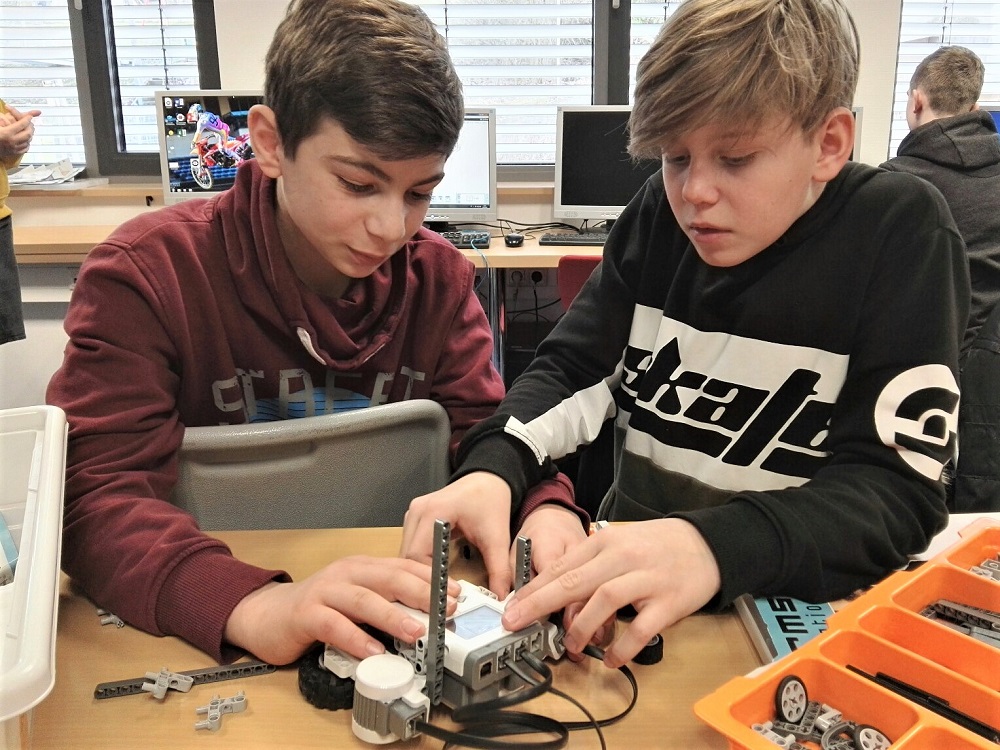
Nach kurzem Gedankenaustausch gehen die Zweierteams an die Arbeit. Bereits nach kurzer Zeit haben die ersten Gruppen Fahrzeuge aus Lego-Technik Bauelementen zusammengesetzt, wägen Vor- und Nachteile einzelner Sensoren zur Erfassung der Hindernisse ab und setzen erste Programmierideen um.
Was hier in einem Satz niedergeschrieben ist, setzt in der Praxis bereits umfangreiche Grundkenntnisse im Umgang mit dem zur Verfügung stehenden „Lego Mindstorms“ Robotersystem voraus. Diese wurden dankenswerter Weise vom Förderverein der Holderbergschule finanziert.
Dieses besteht aus einem programmierbaren Baustein, welcher über Ein- und Ausgänge mit Motoren sowie einer Vielzahl unterschiedlicher Sensoren verbunden werden kann. Das in der zugehörigen Software geschriebene Programm erlaubt es dem Stein nun, gezielt auf unterschiedliche Ereignisse zu reagieren. Sei es ein Abstand, den der Ultraschallsensor übermittelt, eine Information über die aktuelle Lautstärke vom Mikrofon oder ein Drucksignal vom Tastsensor. Jedes Eingangssignal kann vom Programm auf dem Steuerstein erfasst werden und bewirkt entsprechend der Programmierung eine Aktion, wie etwa die Ausgabe eines Textes oder die Drehbewegung eines Motors.
Da die Schülerinnen und Schüler im Kurs in den letzten Monaten das nötige Handwerkszeug schrittweise erlernt haben, stellt das Ursprungsproblem keine allzu große Herausforderung dar. Zwei Motoren mit großen Rädern, die dem Roboterfahrzeug Fahr- und Wendemanöver ermöglichen, ein drittes, drehbares Rad um stabilen Stand zu gewährleisten. Dazu ein Sensor zur Orientierung und das Programm, das alles miteinander verbindet.
Bereits nach ca. einer Zeitstunde befinden sich mehrere Gruppen bereits in der Testphase ihres Modells. Die Grundidee scheint immer ähnlich zu sein. Der „Staubsauger“ fährt geradeaus, stößt irgendwann auf ein Hindernis und wählt dann mehr oder weniger zufällig eine neue Fahrtrichtung aus.
Unterschiede gibt es dabei in der Art der Hinderniserkennung. Zum Zuge kommen in einigen Gruppen Tastsensoren an der Vorderseite, vertreten ist aber auch ein Ultraschallsensor. In den ersten Testfahrten zeigt sich, dass der Tastsensor bei schrägem Auftreffen auf ein Hindernis häufig nicht getroffen wird. Ein Schüler bemerkt zudem, dass „der ja ständig gegen Möbel knallt. Da würde sich mein Papa freuen.“ Der Ultraschallsensor hingegen erledigt seine Aufgabe zuverlässiger und wendet meist bereits kurz vor der Wand. Ein Grund, warum in der Folge die meisten Gruppen auf den Abstandssensor umrüsten.
Dank der einfachen Programmierung mit Hilfe von Blockbausteinen und einigen weiteren Fahrversuchen zur exakten Ermittlung der benötigten Abstände und Fahrzeiten: kein Problem für die Jung-Erfinder. Am Ende der Doppelstunde stehen eine Vielzahl von „Staubsauger-Modellen“ funktionsbereit vor den zufriedenen Schülern. „Jetzt müssten wir noch einen Handstaubsauger einbauen“ lautet ein abschließender Kommentar.
Nächste Woche wartet ein neues Projekt mit neuen Ideen und Lösungsansätzen. Der Kursleiter Tobias Walter ist gespannt!

